![]() 021-49625 |
021-49625 | ![]() 021-46012980 |
021-46012980 | ![]() 09020082182
09020082182
الکتروموتور چیست:
از آنجا که انواع الکتروموتور سه فاز و الکتروموتور تک فاز القایی از اجزای اصلی به کار رفته در صنایع کوچک و بزرگ مختلف میباشند بسیاری از افراد مشغول در این صنایع با گرایش های مختلف تحصیلی و غیرتخصصی برق نیاز به آشنایی کلی و عمومی نسبت به این تجهیز دارند از اینرو در این نوشته سعی شده است با توضیحات ساده وکوتاه آشنایی عمومی در خصوص انوع الکتروموتور القائی متداول ایجاد کنیم. الکتروموتور القائی ماشینی است که نیروی الکتریکی را به نیروی مکانیکی خطی یا چرخشی تبدیل میکند و بر این اساس استوار شده است که اگر یک میله حاوی جریان الکتریکی در یک میدان مغناطیسی قرار گیرد از طرف آن میدان نیروی به آن وارد میشود .
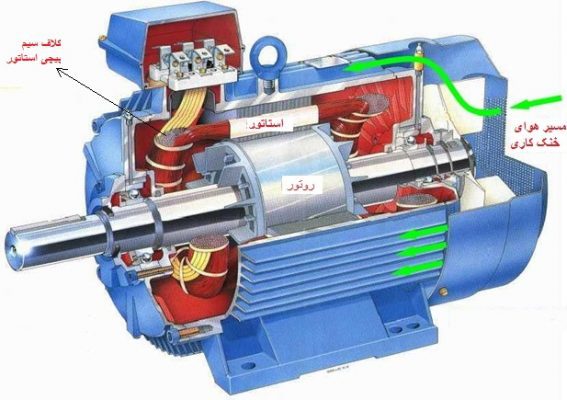
موتورها شامل 2 قسمت اصلی هستند که عبارت از استاتور و روتور بخش متحرک و گردان را روتور و بخش ثابت را که معمولا شامل کلاف های سیم پیچی میباشد استاتور می نامند در شکل زیر نمایی از یک الکتروموتور که استاتور آن برش خورده نمایش داده شده و بخش های مختلف داخلی آن نمایان میباشد
انواع الکتروموتور القائی آسنکرون
انواع الکتروموتورهای القائی متداول مورد استفاده در صنایع را به صورت کلی میتوان به سه دسته زیر تقسیم بندی کرد
الکتروموتور سه فاز پوسته آلومینیومی
الکتروموتور سه فاز پوسته چدنی
الکتروموتور تک فاز
برای شناخت انواع موتور القائی نیاز به شناخت مشخصات کاربری آنها می باشد از اینرو در ابتدا مشخصه های کاربردی این تجهیز را معرفی میکنیم و سپس در انتها انواع الکتروموتورهای مذکور را شرح میدهیم.
مشخصه های کاربردی در انتخاب الکتروموتور چیست؟
توان نامی الکتروموتور:
یکی از آیتم هایی که در انتخاب موتور مد نظر قرار میگرید توان نامی است که معمولا با واحد کیلووات (KW) و یا اسب بخار (HP) مطرح میشود توان نامی که در پلاک مشخصات موتور قرار میگیرد درواقع مقدار توان مکانیکی قابل دسترس روی شفت الکتروموتور است و به صورت حاصلضرب مقدار گشتاورنامی (τ) در سرعت چرخش (ώ) روتور تعریف میشود. هر یک اسب بخار (HP) معادل 0.746 کیلووات (KW) است.
P=τ. ώ
T: مقدار گشتاور نامی
ώ:مقدار سرعت زاویه ای (سرعت جابجایی) روتور
سرعت اسمی (سنکرون ) الکتروموتور:
ناشی از تغذیه الکتروموتور با برق متناوب شبکه برق، میدان مغناطیسی در سیم پیپی های استاتور ایجاد می شود که دائما در حال چرخش حول محوراستاتور می باشد تعداد چرخش این میدان مغناطیسی را حول محور خود در یک دقیقه سرعت سنکرون یا سرعت اسمی می نامند دور اسمی موتورهای که بیشتر در بازار مورد استفاده قرار می گیرند 1500rpm , 3000rpm, 1000rpm, 750rpm میباشد. مقدار سرعت اسمی رابطه معکوس با تعداد قطب موتور دارد (در ادامه معرفی میشود) هرچه تعداد قطب بیشتر باشد سرعت اسمی الکتروموتور کمتر خواهد بود. به عنوان مثال سرعت اسمی موتوری که از شبکه برق ایران (با فرکانس 50 هرتز) تغذیه میشود و 4 قطب (پل) دارد 1500 دور و سرعت اسمی یک الکتروموتور 2 قطب 3000 دور خواهد بود.
سرعت نامی الکتروموتور (rpm):
تعداد چرخش روتور در یک دقیقه را سرعت یا دور نامی می نامند که با واحدrpm مطرح میشود. دور نامی انواع الکتروموتور AC با تعداد قطب (پل) الکترو موتور و فرکانس برق ورودی رابطه دارد. تعداد دور نامی موتور همانند دور اسمی رابطه مستقیم با فرکانس برق ورودی و رابطه معکوس با تعداد قطب (پل) موتور دارد.
تعداد قطب (پل) الکتروموتور:
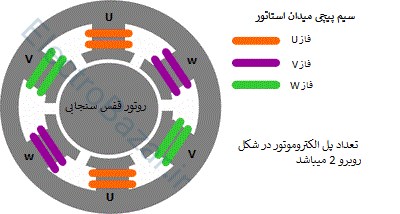
در یک الکتروموتور سه فاز القائی، 3 دسته سیم پیپی اصلی در استاتور وجود دارد که هر دسته سیم پیچی مربوط به یک فاز است. تعداد قطب که در بازار به نام تعداد پل نیز خوانده میشود معمولا ضریبی از عدد 2 است و نشان دهنده تعداد کلاف در هر دسته سیم پیچی استاتور میباشد.
سربندی الکتروموتور:
هر دسته سیم پیچی الکتروموتور، یک ابتدا و یک انتها دارد نوع آرایش و اتصال ابتدا و انتهای این 3 دسته سیم پیچی را سربندی موتور می نامند که به دو صورت متداول ستاره یا مثلث میتواند باشد.
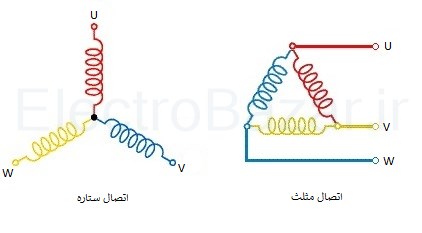
اگر ابتدا و انتهای سیم پیچی های هر سه فاز از داخل موتور بیرون آورده شده باشد و در جعبه ترمینال آن در دسترس باشد میتوان بسته به نیاز، موتور را به صورت اتصال ستاره یا مثلث سربندی و استفاده کرد.
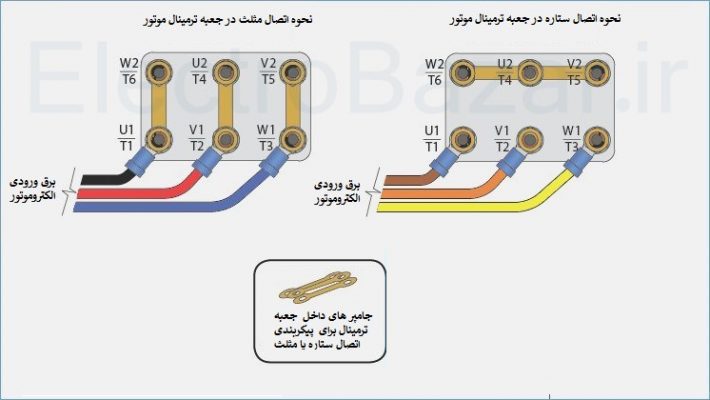
ولتاژ تغذیه برق ورودی
ولتاژ ورودی یکی از آیتم های اصلی است که در انتخاب یک الکتروموتور باید به آن توجه کرد در الکتروموتور تک فاز و الکتروموتور سه فاز بسته به ساختار داخلی، مقدار ولتاژ میتواند متفاوت باشد. در موتور سه فاز سطح ولتاژ برق ورودی با توجه به سطح عایقی دستگاه و نوع سربندی میتواند تغییر کند . به طور مثال اگر روی پلاک مشخصات یک موتور مقابل گزینه ولتاژ عبارت 380D/ 660 Y مشاهده نمودید این یعنی مقادیر ولتاژ ورودی در اتصال ستاره باید 660 و در اتصال مثلث 380 ولت باشد.
فرکانس :
فرکانس شبکه برق ایران به صورت نرمال 50 هرتز است لذا الکتروموتورهایی که به صورت مستقیم از شبکه برق ورودی ایران تغذیه میشوند باید قابلیت کار با فرکانس 50 هرتز را داشته باشند باید توجه داشت در صورت استفاده از برق شبکه محلی یا استفاده از دستگاه کنترل دور موتور فرکانس تغذیه موتور میتواند متفاوت باشد و این مورد باید در انتخاب موتور مورد توجه قرارگیرد.
نحوه نصب الکتروموتور:
بر اساس استاندارد روش های مختلف نصب موتور ها کد گذاری شده است و همگی کد ها با عبارت IM شروع میشوند که در شکل زیر برخی از روشهای متداول نصب و کدهای مربوطه را مشاهده می نمایید.

نحوه خنک کاری الکتروموتور :
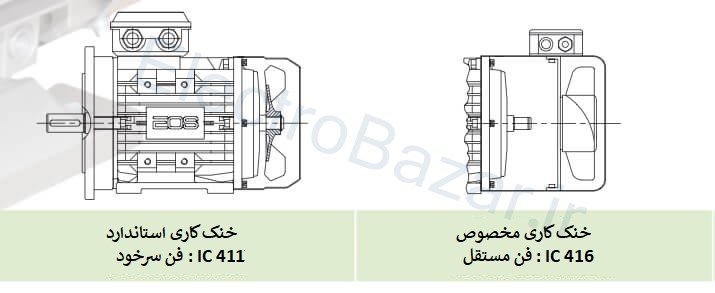
روشهای مختلفی برای خنک کاری الکتروموتور وجود دارد که بر اساس استاندارد این روشها نیز کد گذاری شده اند و همگی کد ها با عبارت IC شروع میشوند (مخفف International Cooling) متداول ترین خنک کاری های مورد استفاده عبارت اند از
IC411 : خنک کاری سرخود با فن نصب شده روی شفت موتور
IC416 : خنک کاری با فن مستقل از شفت موتور
شرایط محیطی استاندارد برای نصب الکترموتور
بر اساس استاندارحداکثر دمای در نظر گرفته شده در محیط نصب الکترموتور 40 درجه سانتی گراد و حداکثر ارتفاع از سطح دریا 1000 متر میباشد. اگر شرایط محیطی از مقادیر مذکور تجاوز کند متناسبا توان خروجی موتور کاهش خواهد یافت از اینرو باید این موضوع در انتخاب توان الکتروموتور مد نظر قرار گیرد تا با بزرگتر انتخاب کردن موتور این مانع را مرتفع کرد.
نسبت کاهش توان خروجی در شرایط محیطی ویژه:
به صورت تقریبی به ازای هر یک درجه افزایش دمای محیط نصب بالای 40 درجه سانتی گراد توان موتور 2 درصد کاهش میابد و به ازای هر 100 متر بالا تر از ارتفاع از سطح دریای 1000 متر توان موتور 1 درصد کاهش میابد.
توضیح بیشتر در خصوص علت کاهش توان خروجی موتور در شرایط مذکور را میتوان این طور مطرح کرد که به دلیل دمای محیط بیشتر و یا ارتفاع از سطح دریای بالاتر (کاهش فشار هوا) قدرت خنک کاری دمای بدنه موتور کاهش خواهد یافت در نتیجه میزان جریان موتور که رابطه مستقیم با توان خروجی موتور نیز دارد باید کاهش یابد تا دمای الکتروموتور بیشتر از حد مجاز قابل تحمل نشود.
کلاس عایقی الکتروموتور
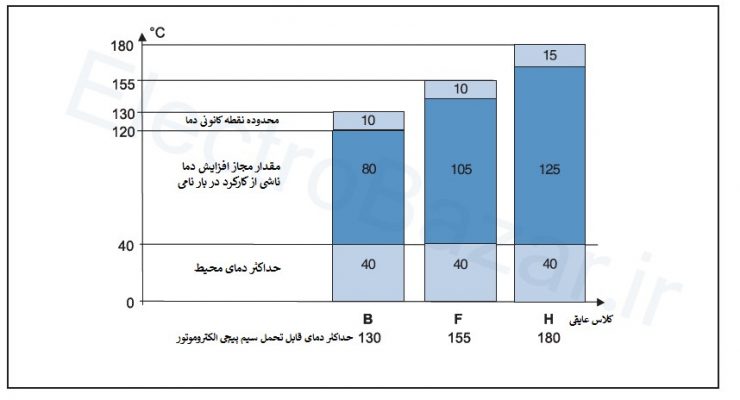
بر اساس استاندارد موتور ها دارای سه کلاس عایقی B, F, H میباشند که در هر کلاس 3 مقوله دمای مجزا وجود دارد که عبارتند از
مقدار مجاز افزایش دما (temperature rise) ناشی از کارکرد
محدوده دمای نقطه کانونی
مقدار دمای قابل تحمل سیم پیچی های موتور (maximum winding temperature)
در شکل زیر سه مقوله فوق در کلاس عایقی الکتروموتور به تصویر کشیده شده که در ادامه به شرح آنها خواهیم پرداخت
مقدار “مجاز افزایش دما” (temperature rise):
این افزایش دما مستقل از مقدار دمای محیط ایجاد میشود و در واقع مقدار افزایش دما ناشی از کارکرد موتور در نقطه بار نامی میباشد. در الکتروموتور ها این مقدار نباید از حد مجاز تعریف شده در کلاس مربوطه افزایش یابد
همان طور که در شکل فوق مشاهده می نمایید مقدار افزایش مجاز دما در کلاس B مقدار 80 درجه میباشد.
محدوده نقطه کانونی دمای (Hotspot temperature margin) :
حد اختلاف دما بین گرمترین نقطه سیم پیچی و سایر سطوح سیم پیچی میباشد
حداکثر دمای قابل تحمل سیم پیچی موتور (maximum winding temperature) :
دمای سیم پیچی الکتروموتور حاصل جمع دمای محیط و دمای ناشی از کارکرد الکتروموتورمیباشد که این دما براساس کلاس های عایقی نباید از حداکثر مقادیر مطروحه برای آن کلاس های بیشتر شود به عنوان مثال حداکثر دمای سیم پیچی برای کلاس F مقدار 155 درجه سانتی گراد میباشد
به طور کلی اکثر الکتروموتورهای صنعتی با کلاس عایقی F و کلاس افزایش دما B تولید میشوند (حداکثر دمای محیط 40 درجه سانتی گراد + مقدار مجاز افزایش دما در کلاس B مقدار 80 درجه + 10 درجه محدوده نقطه کانونی = 130 درجه ) استفاده الکتروموتور با کلاس عایقی F و کلاس دمایی B موجب میشود که محدوده امن دمایی معادل 25 درجه سانتیگراد ایجاد شود به طوری که این امر میتواند امکان افزایش بار موتور را تا 12 درصد برای یک مقطع زمان محدود فراهم کند. همچنین این موضوع باعث افزایش طول عمر عایقی الکتروموتور میشود.
سیستم عایقی کلاس F الکتروموتورها:
حداکثر دمای محیط 40 سانتیگراد
حداکثر مقدار مجاز افزایش دما 105 درجه
حداکثر محدود
کلاس افزایش دمای B الکتروموتورها:
حداکثر دمای محیط 40 درجه سانتیگراد
حداکثر مجاز افزایش دما ناشی از کارکرد 80 درجه
محدوده دمای نقطه کانونی 10 درجه
کلاس دمایی سیستم های عایقی الکتروموتورها:
کلاس F مقدار 155 درجه سانتیگراد
کلاس B مقدار 130 درجه سانتیگراد
کلاس H مقدار 180 درجه سانتیگراد
رژیم های کاری الکتروموتور :
رژیم کاری موتور بسته به مدت کارکرد پیوسته یا مقطعی آن و همچنین میزان تغییرات بار روی الکتروموتور تعریف می شود و براساس استاندارد انواع رژیم کاری با کدهای بین S1 تا S9 تعریف میشود.
برخی از رژیم های کاریی که بیشتر متداول هستند و مثال های از کاربری هایی مرتبط با آن در ادامه شرح میدهیم.
S1 رژیم کاری (duty cycle) پیوسته الکتروموتور:
در این رژیم کاری موتور یک مرتبه استارت شده و با مقدار بار ثابت به صورت پیوسته حداقل تا زمانی که به تعادل دمایی ثابت خود برسد به کار ادامه میدهد. در این نوع رژیم کاری ممکن است موتور به صورت نامحدود به کار خود در زیر بار ادامه دهد.
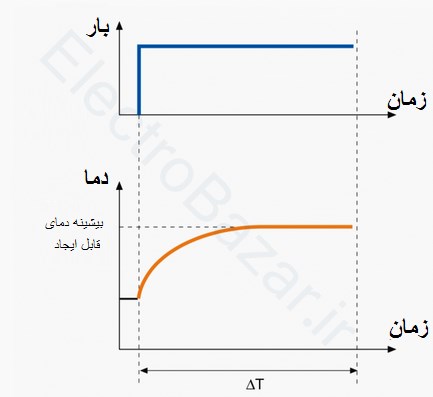
کاربری های مشابه رژیم کاری S1 : نمونه از کاربری های برای این رژیم کاری عبارتند از فن ها و بلورها
S2 رژیم کاری (duty cycle) کوتاه مدت الکتروموتور:
در این رژیم کاری الکتروموتور یک مرتبه استارت شده و با بار ثابت برای یک مدت محدود زمانی کار میکند به طوری که در این مدت محدود به تعادل دمای خود نمی رسد
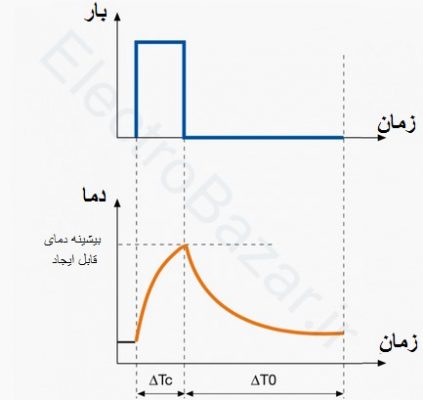
در این رژیم کاری عبارت S2 با یک مدت زمان همراه خواهد بود که نشان دهنده مدت زمان کارکرد میباشد مثال: S2 30min
ΔTc:زمان کارکرد با بار ثابت
ΔT0: زمان قطعی برق ورودی
کاربری های مشابه رژیم کاری S2 : لوازم خانگی همچون سشوار، همزن برقی و خردکن نمونه های از کاربری برای این رژیم کاری هستند.
S3 رژیم کاری (duty cycle) ناپیوسته الکتروموتور با سیکل متناوب :
این رژیم یک چرخه کاری با زمان کار و زمان استحراحت مشخص که به صورت متناوب تکرار میشود در این رژیم کاری بار الکتروموتور در زمان کار مقدار ی ثابت بوده و در زمان استراحت برق ورودی الکتروموتور قطع میباشد همچنین در این رژیم کاری جریان راه اندازی تاثیر قابل توجه ای بر افزایش دما در موتور(temprature rise) ندارد
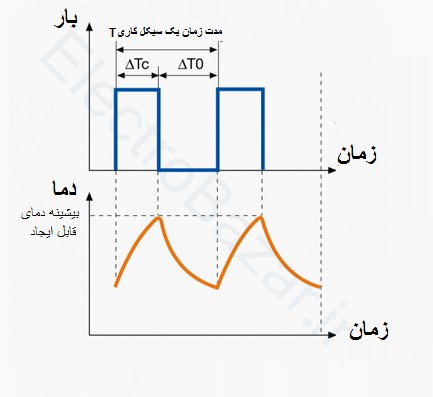
ΔTc:زمان کارکرد با بار ثابت
ΔT0: زمان استراحت با قطعی برق ورودی
ΔTc/T : ضریب رژیم کاری
ضریب رژیم کاری که از نسبت ΔTc بر T به دست می آید معمولا به صورت درصدی شامل مقادیر 15%, 25%, 40%, 60% میباشد
مثال: S3 60%
کاربری های مشابه: کاربری بالابر و لیفت نمونه ای از این نوع کاربری میباشد.
S6 رژیم کاری (duty cycle) پیوسته الکتروموتور با سیکل متناوب:
در این رژیم کاری الکتروموتور به طور پیوسته در حال کار است اما بارگیری الکتروموتور به طور متناوب و با چرخه ای مشخص انجام میگیرد در این رژیم زمان کار در واقع زمانی است که موتور زیر بار است و زمان استحراحت زمانی است که موتور به دون بار در حال چرخش است.
ΔTc:زمان کارکرد با بار ثابت
ΔT0: زمان استراحت با حالت بی باری موتور
ΔTc/T : ضریب رژیم کاری
ضریب رژیم کاری که از نسبت ΔTc بر T به دست می آید معمولا به صورت درصدی شامل مقادیر 15%, 25%, 40%, 60% میباشد
کاربری مشابه : ماشین آلات اره و برش چوب و آهن، پمپ فشار روغن